جلسه دفاع پایان نامه: عرفان نعمتی خیاوی، گروه کنترل
خلاصه خبر:
عنوان پایان نامه: موقعیتیابی تلفیقی UWB/INS برای رباتهای پرنده در محیطهای بسته (بدون GPS) با دقت حداقل 40 سانتیمتر
ارائه کننده: عرفان نعمتی خیاوی استاد راهنما: دکتر سجاد ازگلی استاد ناظر داخلی: دکتر وحید جوهری مجد استاد ناظر خارج از دانشگاه: دکتر ایمان محمد زمان (دانشگاه مالک اشتر) تاریخ: 1403/08/06 ساعت: 15 مکان: دانشکده مهندسی برق و کامپیوتر دانشگاه تربیت مدرس، اتاق 6.36 ، آزمایشگاه سیلیکن
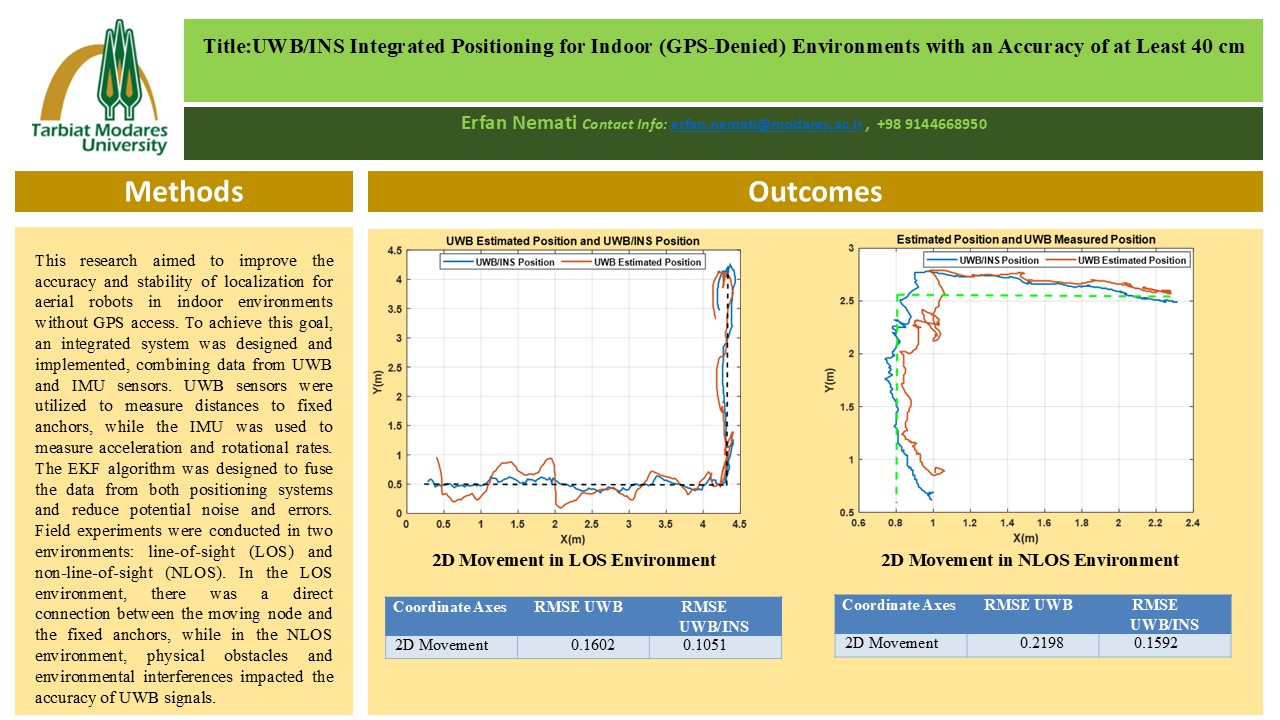
چکیده: این پژوهش رویکردی نوآورانه برای موقعیتیابی دقیق و قابل اعتماد رباتهای پرنده در محیطهای بسته ارائه میدهد. بهدلیل عدم دسترسی به سامانههای ماهوارهای مانند GPS در محیطهای بسته، ترکیب فناوری باند فوقالعاده پهن )UWB( و سامانه ناوبری لخت )INS( به عنوان راهکاری کارآمد در نظر گرفته شدهاست. در این روش، فناوری UWB دقت بالایی در اندازهگیری فاصله بین گرههای مرجع و ربات فراهم میآورد و سامانه INS نیز دادههای شتابسنج و ژیروسکوپ را برای برآورد موقعیت، سرعت و جهتگیری ربات بهکار میگیرد. ترکیب این دو سامانه از طریق الگوریتم فیلتر کالمن توسعهیافته (EKF) به بهبود دقت و پایداری موقعیتیابی کمک میکند، بهطوریکه حتی در شرایط اغتشاش محیطی، موانع فیزیکی یا دسترسی محدود به سیگنالهای مستقیم، موقعیتیابی دقیق با دقت حداقل ۴۰ سانتیمتر حاصل میشود.